책에서 사용하는 소스 코드들을 해당 레포지토리에서 살펴볼 수 있습니다.
navilera/Navilos
RTOS for various embedded platform. Contribute to navilera/Navilos development by creating an account on GitHub.
github.com
3.1 리셋 벡터
ARM 코어에 전원이 들어가면 리셋 벡터에 있는 명령을 먼저 실행시킵니다.
리셋 벡터의 메모리 주소는 0x00000000입니다.
Entry.S 소스 코드
.text
.code 32
.global vector_start
.global vector_end
vector_start:
MOV R0, R1
vector_end:
.space 1024, 0
.end
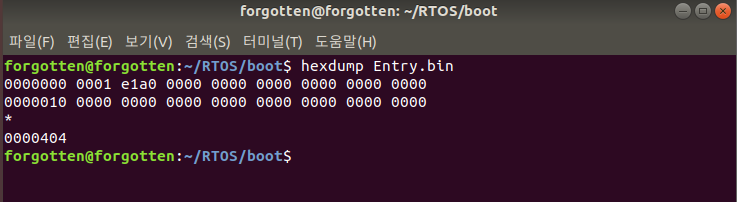
Entry.S 파일을 컴파일하고 바이너리를 덤프해봤습니다.
arm-none-eabi-as -march=armv7-a -mcpu=cortex-a8 -o Entry.o ./Entry.S
arm-none-eabi-objcopy -O binary Entry.o Entry.bin
0001 e1a0이 보입니다.
예측한 대로 제대로 바이너리 파일이 생성됐습니다.
3.2 실행 파일 만들기
QEMU가 펌웨어 파일을 읽어서 부팅하려면 지정한 펌웨어 바이너리 파일이 ELF 파일 형식이여야 합니다.
arm-none-eabi-as를 이용하여 생성한 Entry.o 파일이 ELF 파일입니다.
ELF 파일을 만들려면 링커의 도움이 필요합니다.
링커가 동작하려면 링커 스크립트를 작성해야 합니다.
(보통 애플리케이션을 만들 때는 신경쓰지 않지만, 펌웨어를 개발할 때는 다르다고 합니다.)
navilos.ld 소스코드
ENTRY(vector_start)
SECTIONS
{
. = 0x0;
.text :
{
*(vector_start)
*(.text .rodata)
}
.data :
{
*(.data)
}
.bss :
{
*(.bss)
}
}
아래 명령어를 이용하여 실행 파일을 만들어줍니다.
arm-none-eabi-ld -n -T ./navilos.ld -o navilos.axf boot/Entry.o
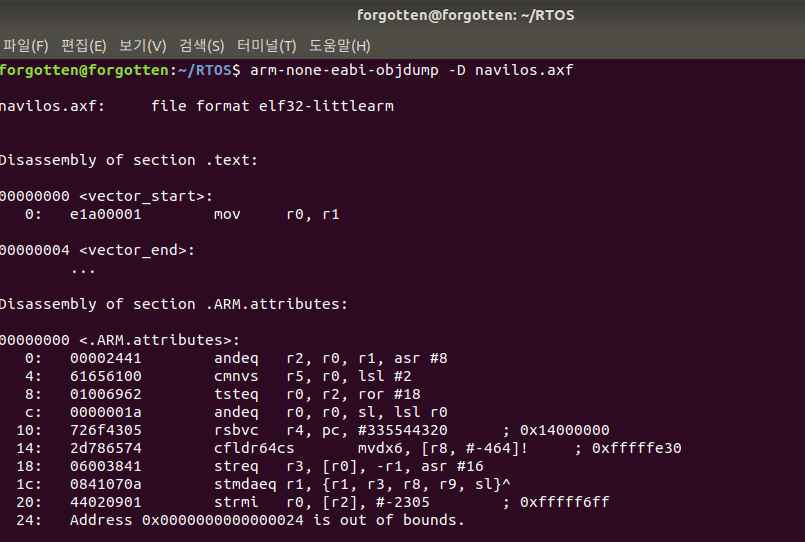
arm-none-eabi-objdump 명령어를 사용하여 파일이 어떤 명령어로 구성되어 있는지 확인해봤습니다.
디스어셈블한 결과를 살펴보면 mov r0, r1 명령어가 잘 배치되어 있습니다.
3.3 QEMU에서 실행해보기
실행 파일을 만들어봤지만 터미널에서 실행시키려 시도해보면 안 됩니다.
ARM 개발 보드에 다운로드 시켜서 동작을 확인하거나 QEMU로 실행해보면 됩니다.
qemu-system-arm -M realview-pb-a8 -kernel navilos.axf -S gdb tcp::1234, ipv4
실습을 하는 도중 문제가 발생했습니다.
arm-none-eabi-gdb 파일이 어디있는지 찾을 수가 없다고 합니다.

askubuntu 사이트에서 저랑 같은 문제를 겪은 사람들을 찾아봤고 실제로 존재했습니다.
How can I install "gdb-arm-none-eabi" on Ubuntu 18.04 (Bionic Beaver)?
In previous versions of Ubuntu, GDB for ARM Cortex processors was part of the package gdb-arm-none-eabi. Searching https://packages.ubuntu.com/ for gdb-arm-none-eabi for Ubuntu 18.04 doesn't return...
askubuntu.com
내용을 살펴보니, gdb-multiarch 패키지를 설치하는 것을 추천하는 답변이 있었습니다.
sudo apt-get update
sudo apt-get install gdb-multiarch
잘 동작하는 것을 보아, 실습을 진행하는 데 딱히 문제는 없어보입니다.


3.4 빌드 자동화하기
일단 make와 관련된 패키지들을 설치했습니다.
sudo apt-get install make
Makefile을 만들어서 빌드를 자동화해봤습니다.
책에서 나온 코드와 조금 달라진 점이 존재합니다.
(아래 링크를 통하여 원본을 확인할 수 있습니다.)
navilera/Navilos
RTOS for various embedded platform. Contribute to navilera/Navilos development by creating an account on GitHub.
github.com
일부 수정된 Makefile
ARCH = armv7-a
MCPU = cortex-a8
CC = arm-none-eabi-gcc
AS = arm-none-eabi-as
LD = arm-none-eabi-ld
OC = arm-none-eabi-objcopy
LINKER_SCRIPT = ./navilos.ld
ASM_SRCS = $(wildcard boot/*.S)
ASM_OBJS = $(patsubst boot/%.S, build/%.o, $(ASM_SRCS))
navilos = build/navilos.axf
navilos_bin = build/navilos.bin
.PHONY: all clean run debug gdb
all: $(navilos)
clean:
@rm -fr build
run: $(navilos)
qemu-system-arm -M realview-pb-a8 -kernel $(navilos)
debug: $(navilos)
qemu-system-arm -M realview-pb-a8 -kernel $(navilos) -S -gdb tcp::1234,ipv4
gdb:
gdb-multiarch
$(navilos): $(ASM_OBJS) $(LINKER_SCRIPT)
$(LD) -n -T $(LINKER_SCRIPT) -o $(navilos) $(ASM_OBJS)
$(OC) -O binary $(navilos) $(navilos_bin)
build/%.o: boot/%.S
mkdir -p $(shell dirname $@)
$(AS) -march=$(ARCH) -mcpu=$(MCPU) -g -o $@ $<
잘 동작하는 것을 확인했고 다음 실습 내용을 진행했습니다.

3.5 하드웨어 정보 읽어오기 - 데이터시트를 읽는 방법
하드웨어의 정보를 읽어오는 간단한 코드를 만들어봤습니다.
Entry.S 소스 코드
.text
.code 32
.global vector_start
.global vector_end
vector_start:
LDR R0, =0x10000000
LDR R1, [R0]
vector_end:
.space 1024, 0
.end
0x10000000에는 어떤 데이터가 들어있을까 궁금하여 유져 가이드 문서를 찾아봤습니다.
SYS_ID 레지스터는 0x10000000 주소에 위치하고 있으며 오로지 데이터를 읽을 수만 있답니다.
32bit 크기의 데이터를 5개의 항목으로 쪼개놓았고 각 항목이 가지는 값에 따라 의미가 존재합니다.

현재 해당 정보를 어디에 사용할 수 있을지 감이 잡히지 않습니다.
다만 실습이 성공했는지 파악하는 용도로는 사용이 가능할 것 같습니다.
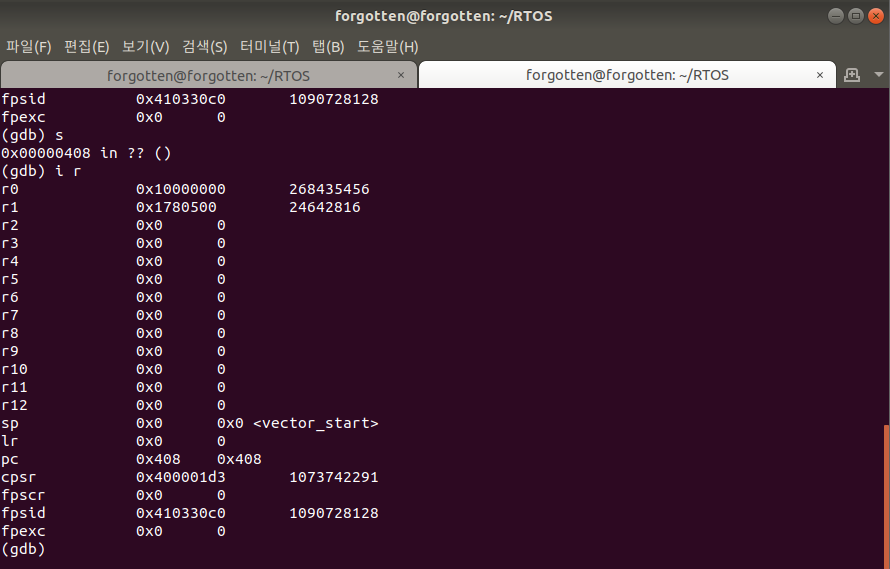
소스 코드를 컴파일하여 실습을 진행해보겠습니다.
R0 레지스터에 0x10000000가 들어간 것을 확인할 수 있고 ...

R1 레지스터에 0x1780500 값이 저장된 것을 확인할 수 있었습니다.
코드를 작성하여 읽어온 정보를 분석해보겠습니다.
(SYS_ID_analysis.py 소스 코드)
data = input("input data : ")
data = int(data,16)
fpga = (data & 0xFF)
arch = (data & 0xF00) >> 8
build = (data & 0xF000) >> 12
hbi = (data & 0xFFF0000) >> 16
rev = (data & 0xF0000000) >> 28
if rev == 0 :
print("Board revision : Rev A")
elif rev == 1 :
print("Board revision : Rev B")
elif rev == 2 :
print("Board revision : Rev C")
else :
print("rev : {0}".format(rev))
print("hbi board number : {0}".format(hex(hbi)))
if arch == 0x4 :
print("Bus architecture : AHB")
elif arch == 0x5 :
print("Bus architecture : AXI")
else :
print("Bus : {0}".format(hex(bus)))
실행시켜보면 책에서 나온 정보와 일치하는 것을 확인할 수 있습니다.

3.6 요약
코드를 작성하고 하드웨어에서 실행해봤습니다.
제대로 동작하는지 확인해보기 위해 하드웨어의 레지스터에 접근해봤습니다.
결과를 확인하기 위해 gdb도 사용해봤습니다.
3.7 비고
gdb, Make, 링커 스크립트에 대한 간단한 정리가 필요할 것 같습니다.
일단 실습은 계속 진행하면서 시간적으로 여유가 생기면 블로그에 내용을 정리하여 포스트로 올리겠습니다.
'research > Book' 카테고리의 다른 글
| 임베디드 OS 개발 프로젝트 / 2장 / 개발 환경 구성하기 (0) | 2020.09.01 |
|---|
